|
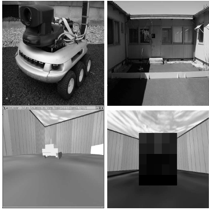
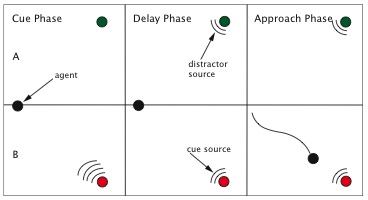
In psychology the A-not-B error, whereby infants perseverate in reaching to the location where a toy was previously hidden after it has been moved to a new location, has been the subject of fifty years research since it was first identified by Piaget. We have investigated whether mechanisms that regulate plasticity can account for some of the observations of how this behaviour develops in infants. We use a minimal setting replicating the logic of the A-not-B situation using sound cues for evolved mobile agents (top right).
The model demonstrates that the agents can perform the A-not-B task and that homeostatic
mediation of plasticity produces perseverative error patterns similar
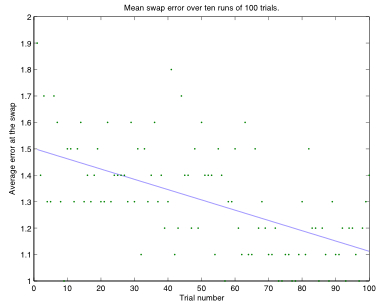
to those observed in human infants. In addition, the model shows a trend for the production of perseverative errors to reduce during development (bottom right) and, also like babies, on production of distractor patterns before the swap. A single mechanism (homeostatic regulation) is able to reproduce qualitative observations across widely varying timescales.
Wood, R. and Di Paolo, E. A. (2007). New models for old questions: Evolutionary robotics and the 'A not B' error. In Proceedings of the 9th European Conference on Artificial life ECAL 2007. Springer-Verlag.
|