When looking at mechanisms with cognitive functionality (and artificial
intelligence in general) it is useful to begin with the simplest cases.
Braitenberg `vehicles' are very simple mobile machines that use basic
sensory-motor connections to produce seemingly cognitive behaviors.
Braitenberg's approach
`We will talk about machines with very simple internal structure ...
when we look at these machines or vehicles as if they were animals in a
natural environment ... we will be tempted, then, to use psychological
language in describing their behavior. And yet we know very well that
there is nothing in these vehicles that we have not put in ourselves.'
This and all other quotes and figures are from the first five chapters
of (Braitenberg, 1984)
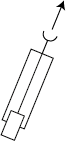
Vehicle 1: approach (pp. 3-5)
Vehicle 1: the simplest vehicle. The speed of the motor (rectangular box
at the tail end) is controlled by a sensor (half circle on a stalk, at
the front end). Motion is always forward, in the direction of the arrow,
except for perturbations.
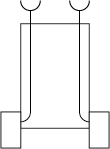
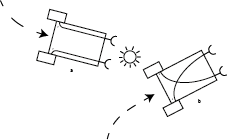
Vehicle 2a: fear (pp. 6-9)
This vehicle spend more time in the places with less stimulation, and
speeds up when exposed to more stimulation.
If the stimulation is directly ahead, the vehicle may hit the source.
Otherwise, it will tend to turn away from the stimulation.
Vehicle 2b: aggression
If the sensor-motor connections are crossed, the behaviour changes. If
the stimulation is directly ahead, the vehicle moves directly towards it
as before. But, if the stimulation is to one side, the vehicle will
tend to veer towards it with increasing speed.
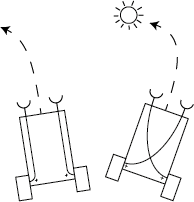
Fear and aggression
Anthropomorphic interpretation
Braitenberg illustrates the potential for over-blown interpretation.
`Let Vehicles 2a and 2b move around in their world for a while and watch
them. Their characters are quite opposite. Both DISLIKE sources. But 2a
becomes restless in their vicinity and tends to avoid them, escaping
until it safely reaches a place where the influence of the source is
scarcely felt. Vehicle 2a is a COWARD, you would say.
Not so Vehicle 2b. It, too, is excited by the presence of sources, but
resolutely turns toward them and hits them with high velocity, as if it
wanted to destroy them. Vehicle 2b is AGGRESSIVE, obviously.'
LEGO NXT demo of behaviours
More behaviors
Inhibition
`The violence of Vehicle 2b, no less than the cowardice of the companion
2a, are traits that call for improvement. ... What comes to mind is to
introduce some inhibition in the connections between the sensors and the
motors, switching the sign of the influence from positive to negative.
This will make the motor slow down when the corresponding sensor is
activiated.'
(Braitenberg, 1984, p. 10).
Vehicles 2a and 2b
Vehicle 3a: love
Making the connections of vehicles 2a and 2b inhibitory produces
vehicles 3a and 3b.
These show completely different behaviour.
Approaching the stimulation, Vehicle 3a will orient towards it and come
to rest facing it.
Vehicle 3b on the other hand will come to rest facing away from the
stimulation.
Love v. exploration
Optimistic interpretation
`You will have no difficulty giving names to this sort of behavior.
These vehicles LIKE the source, you will say, but in different ways.
Vehicle 3a LOVES it in a permanent way, staying close by in quiet
admiration from the time it spots the source to all future time. Vehicle
3b, on the other hand, is an EXPLORER. It likes the nearby source all
right, but keeps an eye open for other, perhaps stronger sources, which
it will sail to, given a chance, in order to find a more permanent and
gratifying appeasement.' (p. 12)
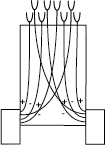
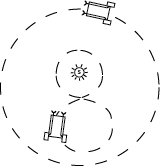
Vehicle 3c: a system of values
`... not just one pair of sensors but four pairs, turned to different
qualities fo the environment, say light, temoperature, oxygen,
concentration, and amount of organic matter.'
Expected behavior
Given appropriate connections, `this is a vehicle with really
interesting behavior. It dislikes high temperature, turns away from hot
places, and at the same time seems to dislike light bulbs with even
greater passion, since it turns towards them and destroys them... You
cannot help admitting that Vehicle 3c has a system of VALUES, and, come
to think of it, KNOWLEDGE'
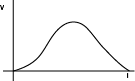
Vehicle 4: special tastes
`Let us consider the following improvement. The activation of a certain
sensor will make the corresponding motor run faster but only up to a
point, where the speed of the motor reaches a maximum. Beyond this
point, the speed will decrease again.'
`A 4a vehicle might navigate towards a source (as Vehicle 2b would) and
then turn away when the stimulus becomes too strong, circle back and
then turn away again over and over again'
Effects of non-linear, non-monotonic connections
`You will have a hard time imagining the variety of behavior displayed
by vehicles of brand 4a.'
"shy but defensive" behavior
Getting stuck in the corner...
.
Summary
The early Braitenberg vehicles just how much cognitive traction can
be obtained when a simple reactive dynamic is combined with a
particular environment.
Variation in patterns of sensory-motor connection produces widely
diverging behaviors.
Use of inhibitory connections can significantly extend repertoire.
Use of non-linear sensory-motor connections can produce behaviors
that are impossible to predict (i.e., you have to run the vehicle to
find out).
The Achilles Heel of the Braitenberg vehicle is ease with which such
vehicles get stuck in corners.