KR-IST - Lecture 4a Heuristic search with A*
Chris Thornton
The problem of the supersized search space
Search is a flexible tool which can be used, in principle, to
obtain a solution to any problem.
In practice, there is a serious difficulty.
For most problems, the search tree is just too big to
explore in a reasonable amount of time.
Even for a problem as simple as the 8-puzzle, there are more than 31
thousand, million states to be checked.
Checking states at the rate of one per millisecond, this would
take nearly a year.
The need for knowledge
If the search process is left to blindly explore the entire search space
there is the risk that it will take too long.
It is generally necessary to provide knowlege which will enable
the search to move more directly towards a solution node.
Search processes with knowledge of this type are said to be
informed.
Processes which carry out the search in a blind or exhaustive fashion
are said to be uninformed.
Evaluation functions
Knowledge is provided to the search in the form of an evaluation
function for search nodes.
This function returns a value which estimates the cost of a
given node, i.e., how far it is from a goal node.
The search process can use the function to select the best
node to expand at any point (i.e., to choose `which way to
go').
Evaluation functions are heuristic functions
Evaluation functions are often called heuristic
functions on the grounds that they utilise rules-of-thumb.
Search using evaluation functions is therefore heurstic
search.
But this is more than just terminology.
It would be inconsistent to use a completely accurate evaluation
function for purposes of guiding a search.
Or at least it would be strange to describe the resulting process as
`search'.
With a completely accurate evaluation function, the right
branch can be selected at every stage. Search is not
required.
Best-first search
Let's say we have an evaluation function which estimates the cost of
reaching a goal from any given node, i.e., its `distance'.
- f(n) = distance to the nearest goal from n
We can use a cost function of this type to decide which of a
set of nodes should be expanded next. We just expand the node
with the lowest f value.
This procedure is known as best-first or ordered search.
Implementational issues
With best-first search, successors are not checked in a fixed
sequence.
So it is necessary to maintain some sort of data structure to show which
nodes remain unchecked.
This is normally done using two list structures:
- A list called OPEN containing nodes which have been generated but not
expanded.
- A list called CLOSED containing nodes which have already been
expanded.
Processing loop
In each iteration, the algorithm selects the most promising node from
OPEN, e.g., the node with lowest estimated cost.
If the node is a goal node, a solution has been obtained.
If the node is not a goal, it is then moved from OPEN to CLOSED.
Its successors are then examined and any that don't currently appear in
OPEN or CLOSED are added to OPEN.
Best-first search algorithm
(1) Put the start node n on a list called OPEN, of unexpanded
nodes and associate the f(n) value with it.
(2) If OPEN is empty, exit with failure; no solution exists.
(3) Select from OPEN a node n for which f(n) is a minimum. If
several nodes qualify, choose a solution node if there is
one, and otherwise choose among them arbitrarily.
(4) Remove node n from OPEN and place it on CLOSED.
(5) If n is a goal node, exit with success; a solution has been
found.
(6) Expand node n, creating nodes for all its successors. For
every successor n, if n is neither in OPEN nor in CLOSED,
then add it to OPEN, with its f(n) value. Attach a pointer
from n back to the predecessor node (to provide access to the
path to the goal node.)
(7) Go to step (2).
A* search
A* search is essentially best-first search upgraded for use with
path-oriented evaluation functions.
This is the kind of evaluation function that we will need to
use whenever the solution is the path to the goal node
rather than the node itself.
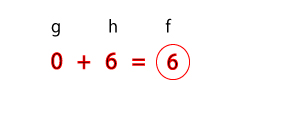
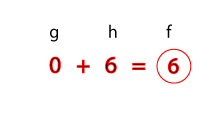
Evaluation with A*
In A* search, evaluation of the cost of a given node is
assumed to be defined in terms of two components, g(n) and
h(n), where
- g(n) = the cost of reaching node n from the start
and
- h(n) = the cost of reaching a goal from n
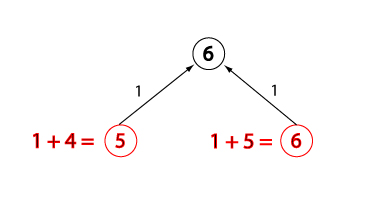
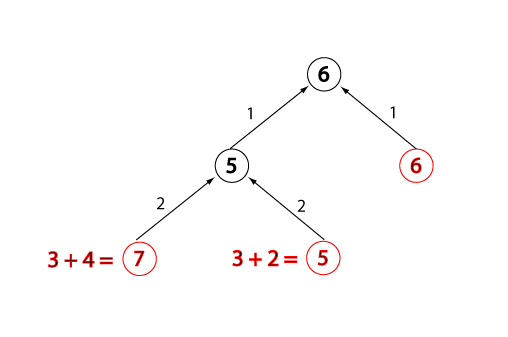
The final evaluation of cost is then the sum of g(n) and h(n):
- f(n) = g(n) + h(n) = overall cost of node n
(In some presentations these functions are written as f*, g* and h* with
the unadorned letters being used to denote the actual costs.)
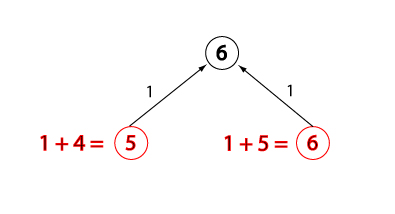
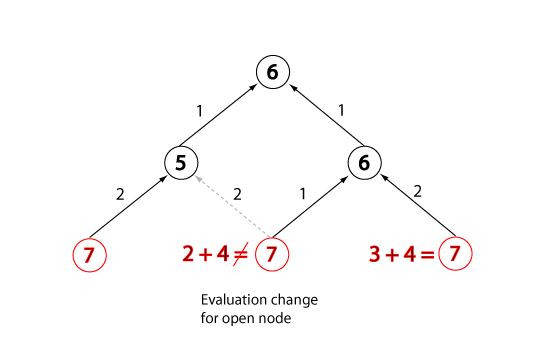
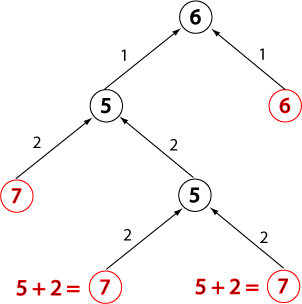
Node updates are required in A* search
The catch with A* is that, due to taking the known part of
the solution into account when working out costs, it is
actually possible for f(n) values to change.
This happens if the search uncovers a new, lower-cost path to
a previously expanded state.
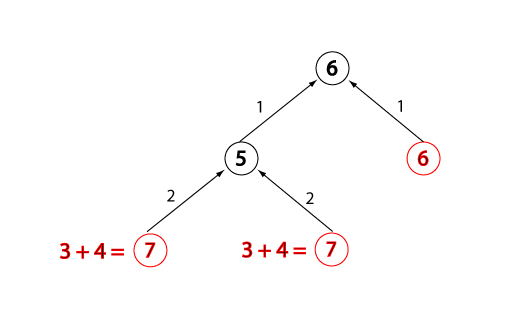
If this situation is detected, the algorithm must update the
evaluations associated with the state, both in OPEN and CLOSED, and
change the predecessor pointer so as to connect it to the new path.
If there is an improvement in the evaluation of a state in CLOSED,
that state must be transferred back to OPEN.
(See step step 6.c in the Handbook of AI, vol 1, p. 61).
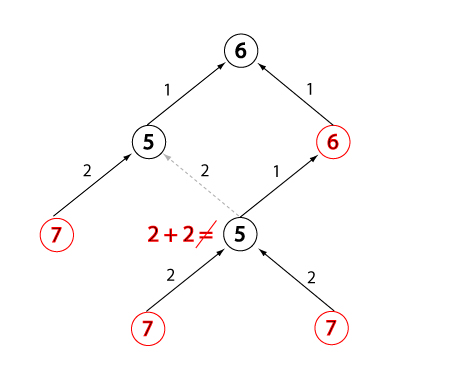
A heuristic which guarantees that f(n) values will never drop in this
way is said to be consistent.
Evaluation change for open node, state 1
Evaluation change for open node, state 2
Evaluation change for open node, state 3
Evaluation change for open node, state 4
Evaluation change for closed node, state 1
Evaluation change for closed node, state 2
Evaluation change for closed node, state 3
Evaluation change for closed node, state 4
Evaluation change for closed node, state 5
Optimality
How reliable is A* search?
The g(n) value is always right, since it measures the cost of
a path which has already been identified. (This is normally
the path length.)
The h value is an estimate.
But provided it never overestimates the cost, the search is
guaranteed to be optimal.
The requirement that h not overestimate the cost is known as
the admissibility criterion.
Why admissibility guarantees optimality
The cost of node at the end of a solution path is guaranteed to be
correct. At this point, h(n) = 0, so f(n) = g(n).
If h never overestimates, the cost of a node at the end of a
sub-optimal solution path must be greater than the cost of any
node on an optimal solution path.
Assuming A* always expands the node with the lowest cost, search
will continue until the optimal solution path is identified.
Unfortunately, in practice, the admissibility criterion may not be
satisfied.
Heuristic function for the 8-puzzle
Russell and Norvig investigate the performance of two possible
heuristic functions for the 8-puzzle problem (see pp. 101-103).
- h1 = the number of tiles that are in the wrong position.
- h2 = the sum of the `city-block' distances of the tiles from their
goal positions.
They use empirical performance evaluations and the concept of
branching factor, to demonstrate that that h2 is
considerably more effective than h1.
They also show that A* search (using either heuristic) is orders
of magnitude faster than ordinary iterative-deepening search, the
best of the `uninformed' bunch.
This result, showing the supremacy of A* search over uninformed
iterative-deepening search, is common across most search problems.
.
Summary
- The problem of the supersized search space
- The need for knowledge
- Evaluation functions
- Best-first search
- A* search
- Evaluation with A*
- Node updates required in A* search
- Optimality of A*
- Admissibility criterion
Questions
- Where heuristic search is used to obtain a solution path, we need a
representation of nodes which allows extra bits of information to be
associated with the state itself. What are those bits of information.
What sort of data-structure might be appropriate for node
representation?
- How can the total number of states in the 8-puzzle be calculated?
- How would you describe a search process whose state evaluation
function was 100% accurate.
- At what point of processing in best-first search is
a search node transferred from OPEN list to CLOSED.
- Why should best-first search avoid adding to OPEN nodes which are
already on that list?
More questions
- Why should A* bother to update evaluations of nodes on CLOSED?
- What would motivate the use of A* search rather than the simpler,
best-first search?
- How many components of cost are used in the calculation of an A*
evaluation.
- What impact does the use of a path-oriented evaluation function have
on the implementation of best-first search?
- On what grounds could one say that A* is not an optimal search
method?
- What is the so-called admissability criterion for evaluation
functions in A*.
More questions
- Why does admissability ensure optimality?
- Explain why R&N's h2 heuristic function is so much more effective for
the 8-puzzle problem than their h1 function.
- How might one go about inventing a good heuristic function for a
novel search problem?
- Why does R&N's goal state for the 8-puzzle have the hole in the
top-left corner?
Exercises
- Assuming the goal state for the 8-puzzle is
1 2
3 4 5
6 7 8
draw out the search tree down to four levels of search (i.e., four
levels plus the start node) using this as the start state. The tree
should only contain one instance of any given state.
3 1 2
4 7 5
6 8
- How many distinct states does this depth-limited search take into
account?
- Estimate the branching factor for this space and compare
the predicted space complexity (at four levels) with the
actual space complexity.
Exercises cont.
- Identify the best path, i.e., the path whose final state is
closest to the goal state.
- Re-draw the search space using
2 1
4 5 3
7 8 6
as the starting state. In what way is this problem
qualitatively different to the original?
Exercises cont.
- Look at Russell and Norvig's analysis of heuristic
functions for the 8-puzzle (section 4.2) and check the
accuracy of their illustration of the way costs for heuristic
h2 are calculated (i.e., h2 = 3 + 1 + 2 + 2 + 2 + 3 + 3 + 2 =
18).
- The A* algorithm is complicated by the need to update
predecessor links (e.g., the need to occasionally move nodes
back from CLOSED to OPEN). Provide an example to illustrate
why the algorithm needs to do this.
- How could the A* algorithm be adapted so as to produce a
tree representation (e.g., structured list) of the space
searched.
Resources
- Russell and Norvig sections 4.1 and 4.2.
- Handbook of AI, Volume 1, C3a and C3b.