AI - Lecture 1b: Route Finding
Chris Thornton
Introduction
The goal in AI is to reproduce intelligent behaviour.
The focus is particularly on replicating thought processes
and knowledge representation.
Other approaches, such as Alife, neural networks and robotics,
focus more on replication of behaviour.
AI approaches are informed by an
- introspective understanding of thought processes,
- concepts of symbolic computation and
- principles of mathematics
Search as a key concept
A key discovery in AI has been that many forms of knowledge
and thought can be represented in terms of a mechanism which
- identifies ways in which possible actions can be
arranged into sequences
- finds a `route' through the sequences which
achieves a desired result.
This is the process known as search.
Most AI methods use search in one way or another.
Route finding
In the simplest case, the possible actions are physical
transitions from one location to another.
starting point to a goal location.
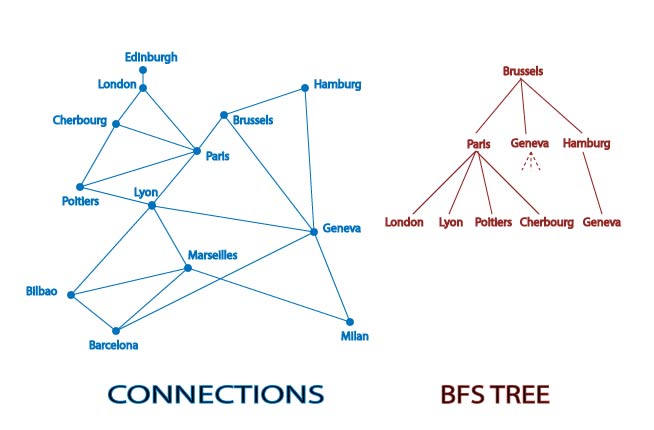
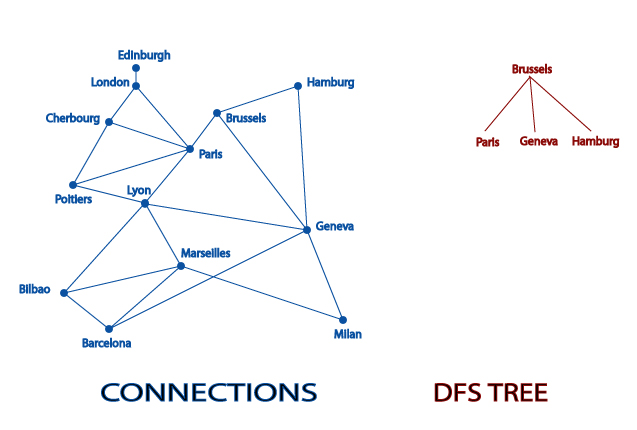
Toy rail map of Europe
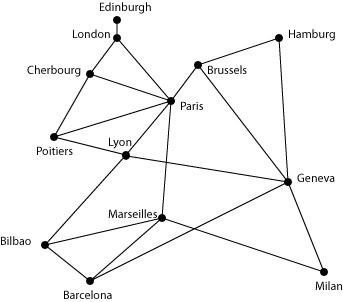
Each (blob-connecting) line represents a direct rail
connection somewhere in western europe.
Route finding task
Route-finding task
- Given knowledge of direct rail connections, what's the
shortest rail itinery which gets you from A to B?
In this problem, action sequences form a tree structure.
At some given point, certain actions are possible.
These actions take you to new points.
At each of those new points, more actions are possible.
And so on.
At each point the possible actions form a branch.
Joining up the branches gives you a tree.
Search by generation
To find a solution, we need to search the tree of possible action
sequences looking for one with the right start and finish.
But since the tree doesn't actually exist to begin with, we will have to
generate it first.
If we are going to do this, we may as well inspect nodes as we are going
along.
So, in practice, `tree generation' and `search' are merged into one
process.
Search strategies
The two basic methods of search:
- Depth-first search (DFS) always expand nodes at a deeper level of
the tree whenever there is a choice.
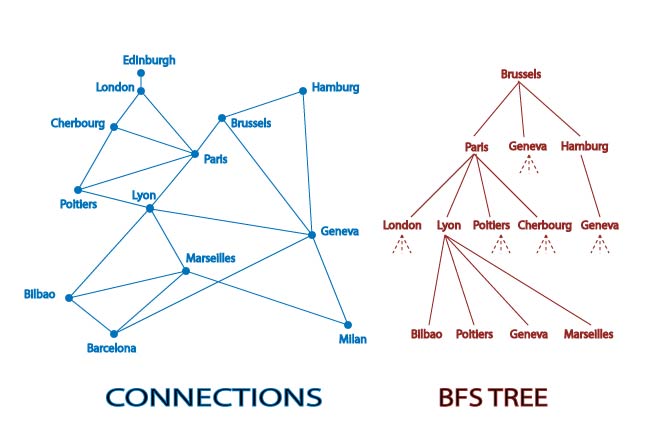
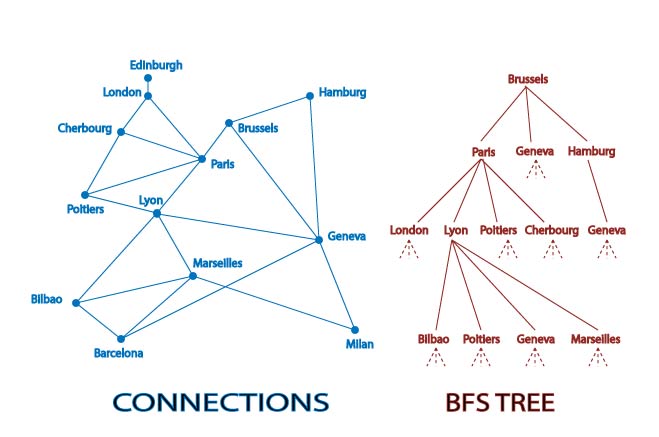
- Breadth-first search (BFS): always expand every node at the present
level of the tree before moving to any deeper level.
DFS is a `maverick'. BFS is `conservative'.
The two strategies can be illustrated by showing how they generate the
search tree for the route-finding problem.
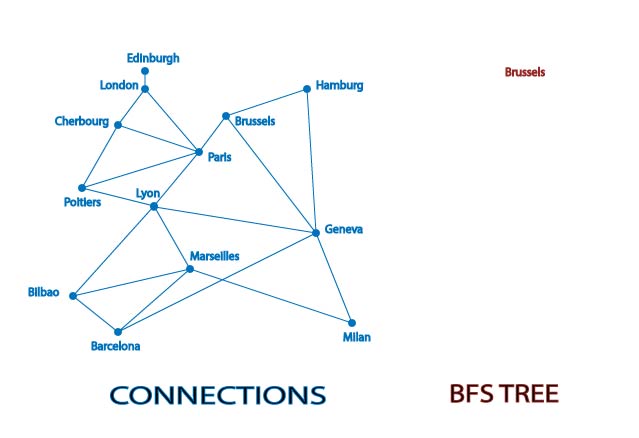
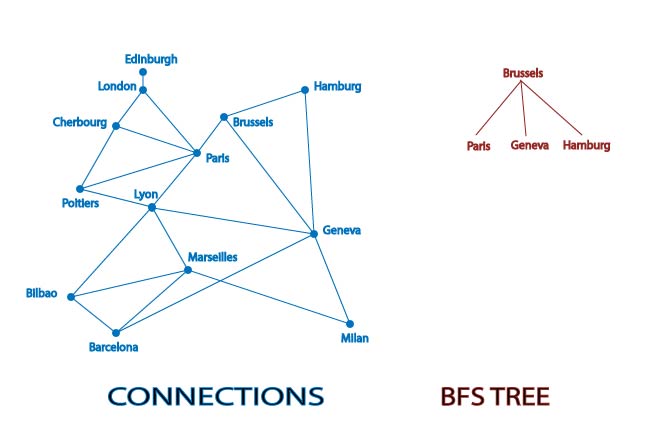
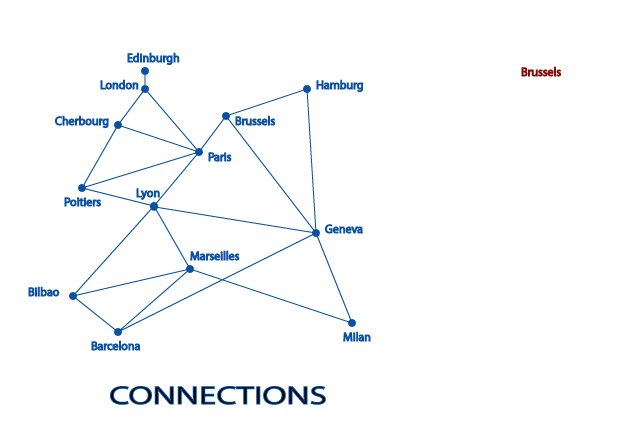
Breadth-first search from `Brussels': step 1
Step 2
Step 3
Step 4
Step 5
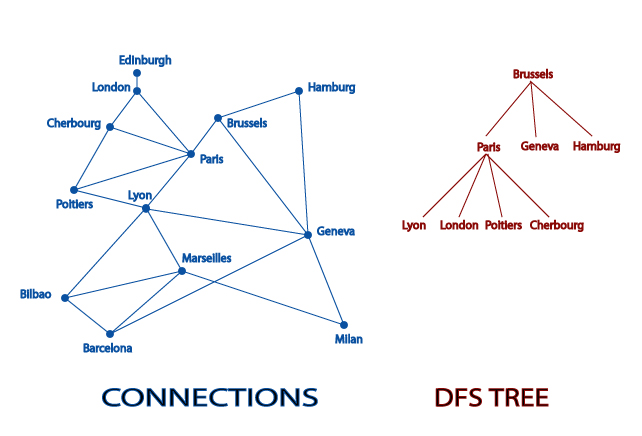
Depth-first search from `Brussels': step 1
Step 2
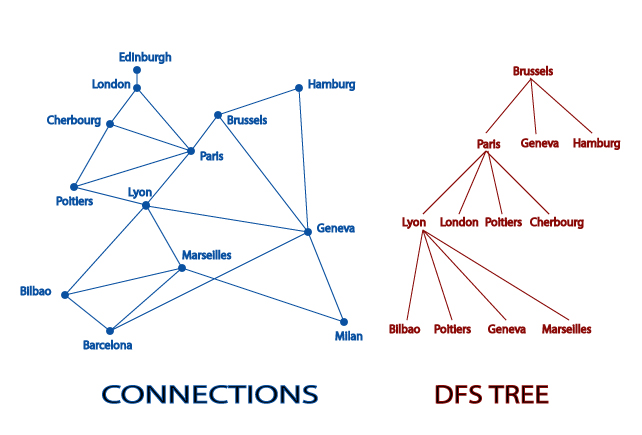
Step 3
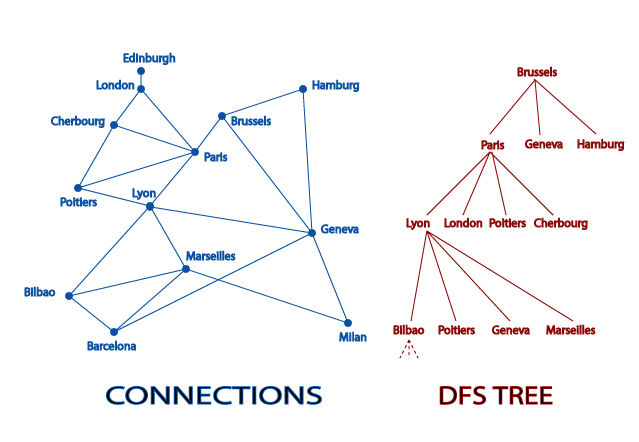
Step 4
Step 5
Node expansion
- To generate the nodes in a particular tree, we first
generate a node to represent the starting point. This is the
start node.
- We then work out the possible transitions from the start
node, creating one node for each point that can be reached.
This is expanding the start node.
- The new nodes are the children or successors of the original
or parent node.
- To continue the search we expand each of the children in turn,
creating more nodes at the next level down.
- Nodes which cannot be expanded are terminal nodes or tip nodes
- The search tree may also be called the search space.
Search completion
The process can end once it has achieved the
desired result.
When a node is about to be expanded, a check should be made to see if it
is the node we're searching for, i.e., if it's a node representing the
goal location.
This is the target or goal node.
As soon as we identify the goal node, a solution to the problem can be
generated by listing out the sequence of nodes connecting the start node
to the goal node.
Any such sequence of nodes is a path.
A path connecting the start node to the goal node is a solution
path.
How much work is involved?
The number of nodes in a search tree multiplies with each new
level.
Even simple problems can create search trees which are
extremely large.
If we don't want to waste a lot of time using trial-and-error, we
need a way of estimating how much work is going to be
involved in a particular search.
- We want to know how much time it's going to take. This is known as
the time complexity of the process.
- We want to know how much memory it's going to need. This is known as
the space complexity of the process.
Branching factor
Time and space complexity are both proportional to the number
of nodes in the tree (although as we'll see, space complexity
is also strongly affected by the strategy used).
To estimate this, we need to calculate the branching factor, which
is just the average number of children of each node.
Next we calculate the depth of the tree, i.e., the
expected number of levels.
To estimate the total number of nodes at a particular level,
we then raise the branching factor to the relevant degree,
i.e., we calculate

where b is the branching factor and d is the depth. This
gives the number of nodes at depth d.
Example
Say the branching factor is 3.
The number of states to be processed at level 1 is then 3.
The number to be processed at level 2 is 3 x 3, or

The number to be processed at level 3 is 3 x 3 x 3, or

And so on.
Time and space complexity
The number of nodes at the deepest level of
search is a lower bound on the total number of nodes.
For many purposes, deriving this value is sufficient to decide
whether or not search is a practical option.
If the expected depth is 8 and the branching factor is 5, a
lower bound on the total number of nodes in the space is

To estimate time complexity, we would multiply this by the
time it takes to check out a single node.
To estimate space complexity, we would multiply this by the
amount of memory it takes to represent a single node.
Again these values would in fact be lower bounds.
.
Summary
- The concept of search
- Route finding
- Tree-structure of possible action sequences
- Search by generation
- Node expansion
- Search strategies (DFS v BFS)
- Branching factor
- Time and space complexity
Questions
- Why do route-finding problems produce tree-structured
searches?
- A particular search tree has a branching factor of 2 and a depth of
4. What is the total number of nodes?
- What additional information is required in order to be able to
identify the space complexity of a search, other than the branching
factor and depth of the tree?
- In what circumstances will the expansion of a search-tree node
produce no children?
- AI is just one of several approaches which seek to replicate
intelligent behaviour. What is distinctive about it?
- Why does AI tend to rely on search-based methods?
More questions
- Depth-first search and breadth-first search are the two basic search
methods. Which one will solve a route-finding problem quickest?
- What are the main components of a search tree?
- What information is needed (i.e., must be saved by the search
process) in order to be able to list a solution path?
- What degree of space complexity implies that a search is intractible?
- What degree of time complexity implies that a search is intractible?
- Define what these terms mean in the context of search: node, start
node, goal node, children, depth, branching factor, path, solution path.
Exercises
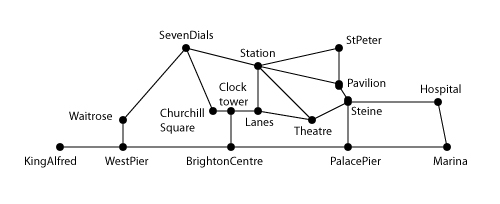
This schematic map of Brighton shows bus routes between a
number of locations. A valid bus route is simply a connected
sequence of locations.
Exercises cont.
- Using the map, draw out the first four levels in the search
tree for bus routes starting from `Clocktower'.
- Add numeric labels (1, 2, 3...) to the nodes in your search
tree to indicate the order in which they would be expanded in
a valid depth-first search.
- Add alphabetical labels (a, b, c...) to the nodes in your
tree to indicate the order in which they would be expanded in
a valid breadth-first search.
- Identify the shortest route (i.e., the route with the
smallest number of legs) connecting WestPier with Steine.
- In the worst case, how many nodes would a depth-first search process
expand in order to identify the shortest route between Clocktower and
StPeter.
Exercises cont.
- Estimate the branching factor for the search tree for this
map, stating any assumptions made.
- Using your estimate of branching factor, estimate the space
complexity of a breadth-first search carried out to a depth of
five levels.
- Using your estimate of branching factor, estimate the space
complexity of an exhaustive, loop-avoiding depth-first search
of this space, stating any assumptions made.
Resources
- Russell and Norvig have a good section on basic search and time and
space complexity; see pp. 74-75